本文共 3156 字,大约阅读时间需要 10 分钟。
DOP Dilution Of Precision
通常为了描述定位误差与伪距误差之间的关系,定义如下精度因子来衡量测量的结果:
几何精度因子(Geometric Dilution Of Precision GDOP) 位置精度因子(Position(3D) Dilution Of Precision PDOP) 水平精度因子(Horizontal Dilution Of Precision HDOP) 垂直精度因子(Vertical Dilution Of Precision VDOP) 钟差精度因子(Time Dilution Of Precision TDOP)σ P = σ E 2 + σ N 2 + σ U 2 \sigma_P=\sqrt{\sigma_E^2+\sigma_N^2+\sigma_U^2} σP=σE2+σN2+σU2
σ H = σ E 2 + σ N 2 \sigma_H=\sqrt{\sigma_E^2+\sigma_N^2} σH=σE2+σN2
σ U = σ U 2 \sigma_U=\sqrt{\sigma_U^2} σU=σU2
σ T = σ T 2 \sigma_T=\sqrt{\sigma_T^2} σT=σT2
P D O P = σ E 2 + σ N 2 + σ U 2 σ = D 11 + D 22 + D 33 PDOP=\frac{\sqrt{\sigma_E^2+\sigma_N^2+\sigma_U^2}}\sigma=\sqrt{D_{11}+D_{22}+D_{33}} PDOP=σσE2+σN2+σU2=D11+D22+D33
H D O P = σ E 2 + σ N 2 σ = D 11 + D 22 HDOP=\frac{\sqrt{\sigma_E^2+\sigma_N^2}}\sigma=\sqrt{D_{11}+D_{22}} HDOP=σσE2+σN2=D11+D22
V D O P = σ U 2 σ = D 33 VDOP=\frac{\sigma_U^2}\sigma=\sqrt{ D_{33}} VDOP=σσU2=D33
T D O P = σ T 2 σ = D 44 TDOP=\frac{\sigma_T^2}\sigma=\sqrt{ D_{44}} TDOP=σσT2=D44
σ G = σ E 2 + σ N 2 + σ U 2 + σ T 2 = D 11 + D 22 + D 33 + D 44 σ \sigma_G=\sqrt{\sigma_E^2+\sigma_N^2+\sigma_U^2+\sigma_T^2} =\sqrt{D_{11}+D_{22}+D_{33}+D_{44}}\sigma σG=σE2+σN2+σU2+σT2=D11+D22+D33+D44σ
多点定位 Multilateration
TDOA (Time difference of arrival)
FDOA (Frequency difference of arrival) TOA (Time of arrival, also time of flight) (ToF) AOA (Angle of arrival) DOA (Direction Of Arrival)Trilateration 三边测量
Triangulation 三角测量 True-range multilateration测向交叉定位 三角定位
在这里假设有两个观测站在大地直角坐标系下对目标进行定位,两观测站的位置分别为
S 0 ( x 0 , y 0 , z 0 ) , S 1 ( x 1 , y 1 , z 1 ) S_0(x_0,y_0,z_0),S_1(x_1,y_1,z_1) S0(x0,y0,z0),S1(x1,y1,z1),目标的位置为 S ( x , y , z ) S(x,y,z) S(x,y,z),观测站与目标的位置关系如图所示。观测站 S 0 S_0 S0获得目标相对于它的方位角和俯仰角为 ( α 0 , β 0 ) (\alpha_0,\beta_0) (α0,β0),观测站S1获得目标相对于它的方位角和俯仰角为 ( α 1 , β 1 ) (\alpha_1,\beta_1) (α1,β1)
x tan α 0 − y = x 0 tan α 0 − y 0 x\tan\alpha_0-y=x_0\tan\alpha_0-y_0 xtanα0−y=x0tanα0−y0
x tan α 1 − y = x 1 tan α 1 − y 1 x\tan\alpha_1-y=x_1\tan\alpha_1-y_1 xtanα1−y=x1tanα1−y1
y tan β 0 − z sin α 0 = y 0 tan β 0 − z 0 sin α 0 y\tan\beta_0-z\sin\alpha_0=y_0\tan\beta_0-z_0\sin\alpha_0 ytanβ0−zsinα0=y0tanβ0−z0sinα0
[ tan α 0 − 1 0 tan α 1 − 1 0 0 tan β 0 − sin α 0 ] [ x y z ] = [ x 0 tan α 0 − y 0 x 1 tan α 1 − y 1 y 0 tan β 0 − z 0 sin α 0 ] \left[\begin{matrix}\tan\alpha_0 &-1 &0\\\tan\alpha_1 &-1 &0\\0 &\tan\beta_0 &-\sin\alpha_0\end{matrix}\right]\begin{bmatrix}x\\y\\z\end{bmatrix}=\begin{bmatrix}x_0\tan\alpha_0-y_0\\x_1\tan\alpha_1-y_1\\y_0\tan\beta_0-z_0\sin\alpha_0\end{bmatrix} ⎣⎡tanα0tanα10−1−1tanβ000−sinα0⎦⎤⎣⎡xyz⎦⎤=⎣⎡x0tanα0−y0x1tanα1−y1y0tanβ0−z0sinα0⎦⎤
DAE
测物距离D,方向角A和俯仰角E
Matlab Mapping Toolbox 3-D Coordinate Systems
Octave 中有开源实现代码geodetic2ecefecef2geodeticgeodetic2enuenu2geodeticecef2enuenu2ecefecef2acraer2ecefaer2geodeticgeodetic2aer[lat,lon,h] = aer2geodetic(az,elev,slantRange,lat0,lon0,h0,spheroid)[az,elev,slantRange] = geodetic2aer(lat,lon,h,lat0,lon0,h0,spheroid)
Geometric Geodesy
wgs84ElipsoidGreat-circle navigation
Geodesics on an ellipsoid经度 lon L
纬度 lat B great circle track rhumb line track无人机
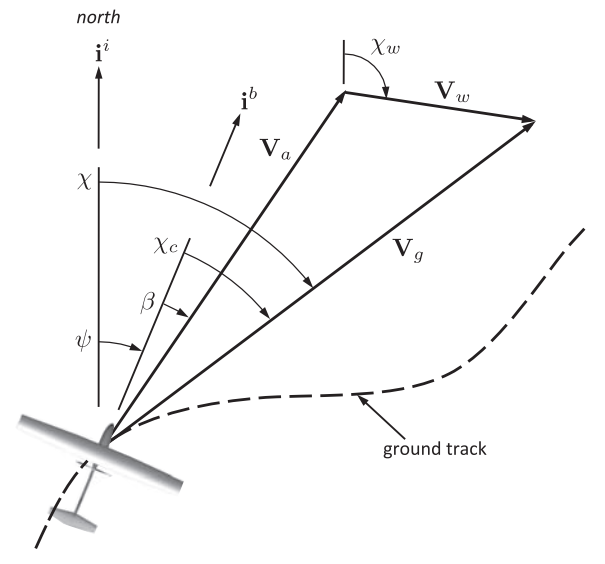
偏航角=航线角-航向角
空速=地速-风速参考文献
Matlab官方文档
双无人机协同测向时差定位误差分析研究转载地址:http://uucqi.baihongyu.com/